Topics
Skill Checklist
Track your progress across all skills in your objective. Mark your confidence level and identify areas to focus on.
41 Skills Available
Track your progress:
Don't know
Working on it
Confident
📖 = included in formula booklet • 🚫 = not in formula booklet
Track your progress:
Don't know
Working on it
Confident
📖 = included in formula booklet • 🚫 = not in formula booklet
Vector arithmetic & geometry
12 skills
2D vector notation
AHL 3.12
Just as points in the plane have an x and a y, 2D vectors have 2 components. We call these i and j.
The following diagram shows the vector −3i−4j, which can also be written as (−3−4)
Concept of a vector
AHL 3.12
A vector is an arrow in space. It specifies movement in a particular direction. For example, the vector i+2j means "move 1 unit right and 2 units up".
The difference between the vector i+2j and the point (1,2) is that a vector can start anywhere, and only specifies a movement. For example, all the vectors below are i+2j.
Addition of 2D vectors
AHL 3.12
Vectors in 2D can be added an subtracted using a diagram. For example, if a=−i+2j and b=3i−2j, then we can find 2a+b as follows:
So 2a+b=i+2j, which we can also find by adding components:
2a+b=2(−i+2j)+(3i−2j)=(−2+3)i+(4−2)j
Position Vectors
AHL 3.12
Vectors can be used to describe the position of points in space, relative to the origin O. For example, if the point A has coordinates A(3,1), then its position vector is
OA=3i+j=(31)
This vector tells you how to get from the origin to point A, and is only subtly different from the concept of coordinates. If B has coordinates B(−4,3), then its position vector is
OB=−4i+3j=(−43)
In the diagram below, the arrows are the position vectors, which are technically different from the points themselves.
Displacement vectors and triangle law
AHL 3.12
A displacement vector tells you how to go from one point to another in space.
For example, suppose point A has position vector OA=3i+j=(31), and B has position vector OB=−4i+3j=(−43).
The displacement vector AB is the vector that goes from A to B:
To find the displacement vector AB, we could count squares on the grid. But the more important thing to realize is that these three vectors form a triangle, and if we reverse one of the position vectors it forms a loop, meaning we've gone nowhere:
OA+AB+BO=(00)
But
BO=−OB=(4−3)
So
(31)+AB+(4−3)=(00)
Now isolate:
AB=(00)−(31)−(4−3)=(−72)
In general, we find the displacement vector from X to Y by finding
XY=OY−OX
You can think of this as saying
to get from X to Y, first go from X to O, and then from O to Y
Scalar multiples of vectors
AHL 3.12
Scaling a vector means multiplying it by a number k, which stretches the vector by a factor of k. If k<0, then the direction of the vector flips.
Parallel vectors
AHL 3.12
Two vectors are parallel if one can be written as a scalar multiple of the other, i.e., if u=kv for some scalar k. Parallel vectors have identical or exactly opposite directions.
3D base and column vectors
AHL 3.12
A vector is a mathematical object that has both magnitude (size) and direction in space. A three-dimensional vector is typically described by its components along the x, y, and z axes.
In 3 dimensions, a vector is expressed as
⎝⎛v1v2v3⎠⎞=v1i+v2j+v3k
where i, j, and k are called the base vectors:
i=⎝⎛100⎠⎞,j=⎝⎛010⎠⎞,k=⎝⎛001⎠⎞
Adding & subtracting vectors in 3D
AHL 3.12
To add two vectors, add their corresponding components:
⎝⎛x1y1z1⎠⎞+⎝⎛x2y2z2⎠⎞=⎝⎛x1+x2y1+y2z1+z2⎠⎞
To subtract two vectors, subtract their corresponding components:
⎝⎛x1y1z1⎠⎞−⎝⎛x2y2z2⎠⎞=⎝⎛x1−x2y1−y2z1−z2⎠⎞
Addition corresponds to placing vectors head-to-tail, and subtraction corresponds to the displacement between their tips.
Zero vector and negative vector
AHL 3.12
The zero vector 0 is a special vector without size or a defined direction, represented by
0=⎝⎛000⎠⎞
The negative of a vector reverses the vector's direction while maintaining its size. If v=⎝⎛xyz⎠⎞, then the negative is
−v=⎝⎛−x−y−z⎠⎞
pointing in exactly the opposite direction.
Vector Magnitude
AHL 3.12
The magnitude (or length) of a vector v=⎝⎛v1v2v3⎠⎞ is calculated as
∣v∣=√v12+v22+v32📖
Geometrically, this represents the distance from the vector's starting point to its endpoint in 3D space. For example, the magnitude of the displacement vector AB equals the straight-line distance between points A and B.
Unit vectors
AHL 3.12
When a vector u has a magnitude of 1, we say u is a unit vector.
We often express other vectors v with magnitude ∣v∣=1 as scalar multiples of the unit vector pointing in the same direction,
v=ku
where k=∣v∣.
The unit vector in the same direction as a non-unit vector v is written as
u=∣v∣v
Rescaling to form a vector with a magnitude of one is referred to as normalizing a vector.
Scalar product
5 skills
Scalar product
AHL 3.13
The scalar product, also called the dot product, takes two vectors and produces a scalar (a number). For two vectors v=⎝⎛v1v2v3⎠⎞ and w=⎝⎛w1w2w3⎠⎞, the scalar product is calculated as:
v⋅w=v1w1+v2w2+v3w3📖
This operation combines corresponding components of each vector, resulting in a single numerical value.
Angle between vectors
AHL 3.13
The scalar product also has a geometric interpretation involving the angle θ between two vectors:
v⋅w=∣v∣∣w∣cosθ📖
Equivalently, isolating cosθ:
cosθ=∣v∣∣w∣v1w1+v2w2+v3w3📖
The angle θ is measured between the heads of v and w:
Acute vs Obtuse Angles
AHL 3.13
If the scalar product of two vectors is negative, then
cosθ=∣u∣⋅∣v∣u⋅v<0
and thus θ must be an obtuse angle: 90°<θ≤180°.
But since vectors always form an acute AND an obtuse angle, we can find the acute angle by subtracting
180°−θ
whenever θ>90°.
Perpendicular vectors
AHL 3.13
Since v⋅w=∣v∣∣w∣cosθ, if two vectors are perpendicular then cos90°=0⇒ their scalar product is 0.
Properties of the scalar product
AHL 3.13
For any vectors u, v, and w, and scalar k:
u⋅v=v⋅u🚫
u⋅(v+w)=u⋅v+u⋅w🚫
(ku)⋅v=k(u⋅v)=u⋅(kv)🚫
u⋅u=∣u∣2🚫
Vector Product
5 skills
Vector product
AHL 3.16
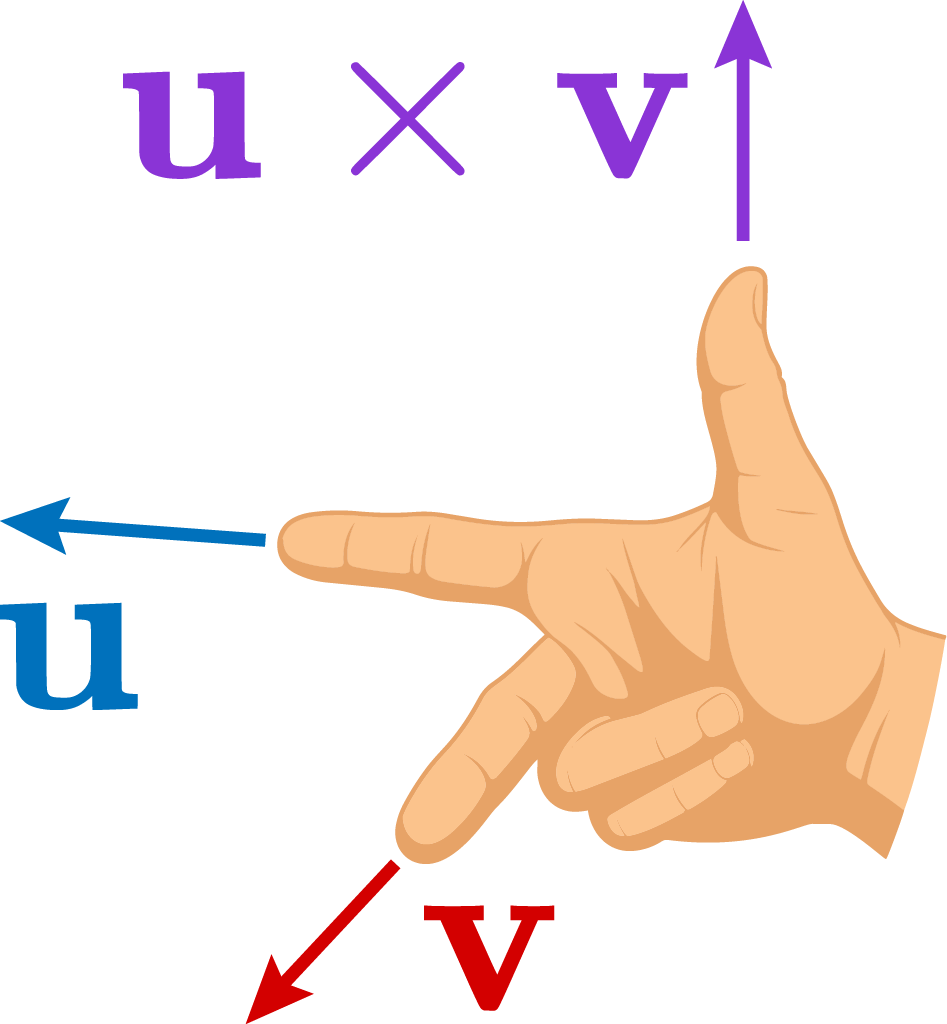
The vector product, sometimes called the cross product, of two vectors v and w is given by:
v×w=⎝⎛v2w3−v3w2v3w1−v1w3v1w2−v2w1⎠⎞📖
This vector is perpendicular to both original vectors. Using the right-hand rule, if your index finger points in the direction of v and your middle finger points towards w, your thumb points towards v×w. The vector product thus creates a new vector perpendicular to both original vectors.
Vector areas with cross product
AHL 3.16
The magnitude of the vector product v×w gives the area of the parallelogram formed by vectors v and w:
Area=∣v×w∣📖
Intuitively, this happens because the magnitude combines both vectors’ lengths and how "spread out" they are from each other, capturing exactly the amount of two-dimensional space they span.
Vector product and sin of angle
AHL 3.16
The magnitude of the vector product is connected to the sine of the angle between the vectors by the formula
∣v×w∣=∣v∣∣w∣sinθ📖
Here, θ is the angle between vectors v and w. This relationship holds because the area of the parallelogram formed by the two vectors depends on their lengths and the angle separating them.
Specifically, the area is largest when the vectors are perpendicular (sin90∘=1) and zero when they are parallel (sin0∘=0).
Components of vectors
AHL 3.16
For two vectors a and b, the magnitude of the component of vector a that acts in the direction of vector b is given by
∣a∣cosθ=∣b∣a⋅b
The magnitude of the component of vector a that acts perpendicular to vector b, in the plane formed by the two vectors, is given by
∣a∣sinθ=∣b∣∣a×b∣
where θ is the angle between the two vectors.
Properties of the vector product
AHL 3.16
For any vectors u, v, and w, and scalar k:
u×v=−(v×u)🚫
u×(v+w)=u×v+u×w🚫
(ku)×v=k(u×v)=u×(kv)🚫
u×u=0🚫
u×v=0⇒u∥v for non-zerou,v🚫
Equations of a vector line
5 skills
Vector form
AHL 3.14
A vector line is defined by specifying one fixed point on the line and a direction vector. If the fixed point is given by position vector a, and the direction vector by b, then the line in vector form is:
r =a+λb📖 =⎝⎛a1a2a3⎠⎞+λ⎝⎛b1b2b3⎠⎞
Here, λ∈R is a parameter that varies over all real numbers, generating every point on the line. Changing λ moves the point r along the direction of b, creating the full infinite line.
Parametric form
AHL 3.14
A vector line in three-dimensional space can also be expressed in parametric form, showing explicitly the equations for the x, y, and z coordinates separately:
x=x0+λl,y=y0+λm,z=z0+λn📖
Here, (x0,y0,z0) is a point on the line, (l,m,n) are the components of the direction vector, and the parameter λ controls your position along the line. Changing λ moves the point continuously along the direction of the vector, producing the full infinite line.
Cartesian form
AHL 3.14
The Cartesian form of a vector line in 3D is obtained by eliminating the parameter λ from the parametric form.
Solving each equation for λ gives:
λ=lx−x0,λ=my−y0,λ=nz−z0
Equating these expressions yields the Cartesian form:
lx−x0=my−y0=nz−z0📖
which clearly emphasizes the consistent ratio of coordinate changes along the line.
If one of the direction vector components is zero, then that coordinate does not change as you move along the line.
Modeling with vectors
AHL 3.14
In kinematics (the mathematical description of motion), 3D motion can be modeled by a vector line, often expressed with the parameter representing time, t.
Specifically, the direction vector b represents the velocity of an object, indicating both its direction and magnitude of movement. The magnitude of this vector, ∣b∣, is the object's speed—the rate at which it moves, irrespective of direction.
Angle between lines
AHL 3.14
The angle between two lines is simply the angle between their direction vectors.
For any two lines r1=a1+λb1 and r2=a2+μb2, the acute angle θ between r1 and r2 can be found via the formula
θ=cos−1(∣b1∣∣b2∣b1⋅b2)
which is just the equation of the scalar product.
Coincident, Parallel, Intersecting & Skew Lines
4 skills
Parallel lines in 3D
AHL 3.15
Two vector lines are parallel if their direction vectors are scalar multiples of each other and the lines are not the same.
Consider two lines:
r1=a1+λb1,r2=a2+μb2.
These lines are parallel if b1=kb2 for some scalar k, but a1 does not lie on r2.
Coincident lines
AHL 3.15
Two vector lines are coincident if they represent exactly the same line, meaning every point on one line also lies on the other. For lines given by:
r1=a1+λb1,r2=a2+μb2,
they are coincident if:
Their direction vectors are parallel, so b1=kb2.
A point from one line (e.g., a2) lies on the other line, satisfying a2=a1+λb1 for some scalar λ.
Intersecting lines
AHL 3.15
Two vector lines intersect if they share exactly one common point. That means they are not parallel.
Skew lines
AHL 3.15
Two lines in three-dimensional space are skew if they are neither parallel nor intersecting.
Equations of a plane
3 skills
Vector form
AHL 3.17
A plane in 3D space can be described by a vector equation involving a fixed point and two direction vectors lying in the plane. Planes are often denoted by Π (capital pi).
If the position vector of the fixed point is a, and two non-parallel direction vectors in the plane are b and c, then the plane is represented by:
Π:r=a+λb+μc📖
Here, λ and μ are parameters that can take any real values, allowing r to move freely across the entire surface of the plane.
Scalar product form
AHL 3.17
The scalar product form of a plane uses a vector perpendicular ("normal") to the plane and one known point in the plane. If a point in the plane has position vector a and n is a normal vector, then any other point r lies in the plane if:
Π:r⋅n=a⋅n📖
This equation expresses the idea that the vector from the known point to any other point in the plane is always perpendicular to n.
Cartesian equation of a plane
AHL 3.17
The Cartesian equation of a plane with a normal vector n and containing a point with position vector a is
n1x+n2y+n3z=d📖
where n=⎝⎛n1n2n3⎠⎞,d=a⋅n.
Angles and intersections with planes
7 skills
Intersection of line and plane
AHL 3.18
To find the intersection of a line and a plane, substitute the vector line equation into the plane equation and solve for the parameter λ.
Angle between line and plane
AHL 3.18
The angle ϕ between a line and a plane is measured as the complement of the angle between the line’s direction vector d and the plane’s normal vector n.
Since the normal forms an angle of 90° with the plane, we can construct a right angled triangle using the intersection of the normal, the line, and the plane:
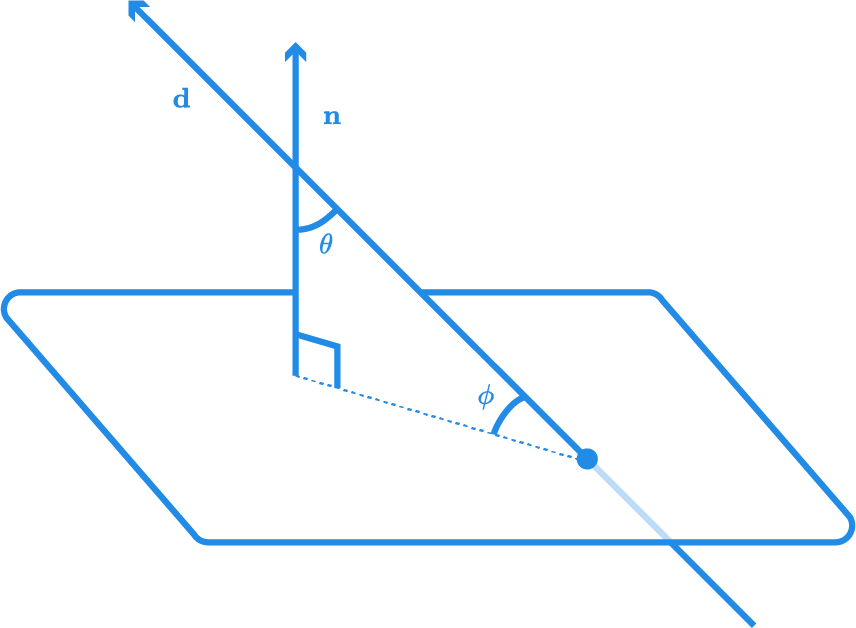
If θ is the angle between d and n, then ϕ=180°−90∘−θ=90°−θ
In practice, you can compute θ using cosθ=∣d∣∣n∣d⋅n.
Intersection between 2 planes
AHL 3.18
The intersection of 2 planes - if they are not parallel - is a line. We can find the line intersection by solving a system of equations.
Angle between 2 planes
AHL 3.18
The angle θ between two planes can be found by computing the angle between the two plane normals:
θ=arccos(∣n1∣∣n2∣n1⋅n2)
The diagram below illustrates why this works. Note that the formula above gives the angle between the "heads" of the normal vectors, which can either be acute or obtuse. Just like the angle between lines, if the question asks for an acute angle and cos−1 returns an obtuse angle, just subtract it from 180∘ to get the acute angle.
Solving systems of equations with 3 unknowns
AHL AA 1.16
Systems of 3 equations with 3 unknowns, for example
(1)(2)(3)⎩⎪⎨⎪⎧2x−3y+4z=85x+2y−z=63x+4y+2z=17
can be solved with a calculator, or by using substitution.
Worked solution
For the system above, equation (2) is a convenient place to start, because it contains just −z, so it is easy to rearrange for z:
z=5x+2y−6
Now substitute this expression for z into equations (1) and (3).
2x−3y+4(5x+2y−6)=8
22x+5y=32
Using equation (3):
3x+4y+2(5x+2y−6)=17
13x+8y=29
We know have a system of 2 equations with 2 unknowns. Eliminate y by taking
8(22x+5y)−5(13x+8y)=8⋅32−5⋅29
176x+40y−65x−40y=256−145
111x=111
x=1
Now substitute x=1 into 13x+8y=29:
13(1)+8y=29
y=2
Finally, substitute x=1 and y=2 into z=5x+2y−6:
z=5(1)+2(2)−6
z=3
So the solution is x=1,y=2,z=3.
Solution count for 3 by 3 systems of equations
AHL AA 1.16
A system of 3 equations with 3 unknowns can have
no solutions
a unique solution
infinitely many solutions
Example
Consider the system of equations
(1)(2)(3)⎩⎪⎨⎪⎧x+2y−z=1−x−y−z=−1x+ay+2z=2
Add equations (1) and (2):
y−2z=0
y=2z
Now add equations (2) and (3):
(a−1)y+z=1
Substitute y=2z:
(a−1)(2z)+z=1
(2a−1)z=1
If 2a−1=0, then we can solve for
z=2a−11
and then find y and z. This represents a unique solution.
But if 2a−1=0, ie a=21, then we have 0z=1, to which there are no solutions.
Intersection of 3 planes
AHL 3.18
When three planes are considered together, their intersection in 3D space can take several forms:
A plane if all three planes coincide.
A single point if the three planes intersect uniquely, meaning their normal vectors are not all parallel or in some degenerate arrangement, and the system of equations has exactly one solution.
A line if two planes intersect in a line and the third plane also contains that line (or if each pair of planes meets along the same line).
No intersection if the system of equations is inconsistent (e.g., the planes are arranged in parallel or partially parallel ways that do not share a common point).