Topics
Skill Checklist
Track your progress across all skills in your objective. Mark your confidence level and identify areas to focus on.
39 Skills Available
Track your progress:
Don't know
Working on it
Confident
📖 = included in formula booklet • 🚫 = not in formula booklet
Track your progress:
Don't know
Working on it
Confident
📖 = included in formula booklet • 🚫 = not in formula booklet
Limits and Derivatives
10 skills
Basic concept of a limit
SL 5.1
The limit x→alimf(x) is the value f(x) approaches as x approaches a.
Slope as a Limit
SL 5.1
The IB may test your understanding of the gradient of the curve as the limit of
m=x2−x1y2−y1
as (x2−x1) goes to zero.
Limit from a graph
SL 5.1
x→1limf(x)=2
x→∞limf(x)=23
x→−∞limf(x)=23
Limit from a table
SL 5.1
Given a table of values:
xf(x)0.91.620.991.91210.9991.9972201……
x→1limf(x)=2
Limit definition of derivative
AHL 5.12
The derivative of f(x) is denoted f′(x) and is given by
f′(x)=h→0limhf(x+h)−f(x)📖
Example: find the derivative of f(x)=x3−x using the limit definition.
f′(x)=h→0limhf(x+h)−f(x)
a
f′(x)=h→0limh(x+h)3−(x+h)−x3+x
Expand (x+h)3=x3+3x2h+3xh2+h3, so
f′(x)=h→0limhx3+3x2h+3xh2+h3−x+h+x3+x
Canceling terms:
f′(x)=h→0limh3x2h+3xh2+h3+h
Now divide through by h, since h=0 in a limit:
f′(x)=h→0lim(3x2+3xh+h2+1)=3x2+1
Gradient
SL 5.1
For a curve y=f(x), f′(x) is the function that tells you the slope of f(x) at a certain x coordinate.
Graphing a derivative with a GDC
SL 5.1
You can graph f′(x) using the following steps:
Press the
Y=key.In one of the available function lines (e.g.
Y_1), enter the expression for f(x).In another available line (e.g.
Y_2), input the derivative function usingMATHthen8:nDeriv(in the following format:dXd(Y1(x))∣X=XTo enter Y1, press
VARSthen scroll toY-VARSand selectFUNCTIONthen Y1.Press
GRAPHto display both the original graph f and the derivative f′.The graph of f′ may take a little bit longer depending on the original function.
After graphing f′, you may use all the other graphing functions on the calculator (intersect, zero, and value).
Rate of Change
SL 5.1
dxdy is the rate of change of y with respect to x. That is, dxdy tells us how much y changes in response to a change in x.
If y=f(x), then dxdy=f′(x).
Derivative of xⁿ where n is an integer
SL 5.3
f(x)=xn, n∈Z⇒f′(x)=nxn−1📖
Derivatives of sums and scalar multiples
SL 5.3
dxd(af(x))=af′(x)🚫
dxd(f(x)+g(x))=f′(x)+g′(x)🚫
dxd(af(x)+bg(x))=af′(x)+bg′(x)🚫
Differentiation rules
12 skills
Derivative of xⁿ where n is an integer
SL 5.3
f(x)=xn, n∈Z⇒f′(x)=nxn−1📖
Derivatives of sums and scalar multiples
SL 5.3
dxd(af(x))=af′(x)🚫
dxd(f(x)+g(x))=f′(x)+g′(x)🚫
dxd(af(x)+bg(x))=af′(x)+bg′(x)🚫
Derivative of xⁿ where n is rational
SL 5.6
f(x)=xn, n∈Q⇒f′(x)=nxn−1📖
Derivative of e^x
SL 5.6
f(x)=ex⇒f′(x)=ex📖
Derivative of ln
SL 5.6
f(x)=lnx⇒f′(x)=x1📖
Derivatives of sin and cos
SL 5.6
f(x)=sinx⇒f′(x)=cosx📖
g(x)=cosx⇒g′(x)=−sinx📖
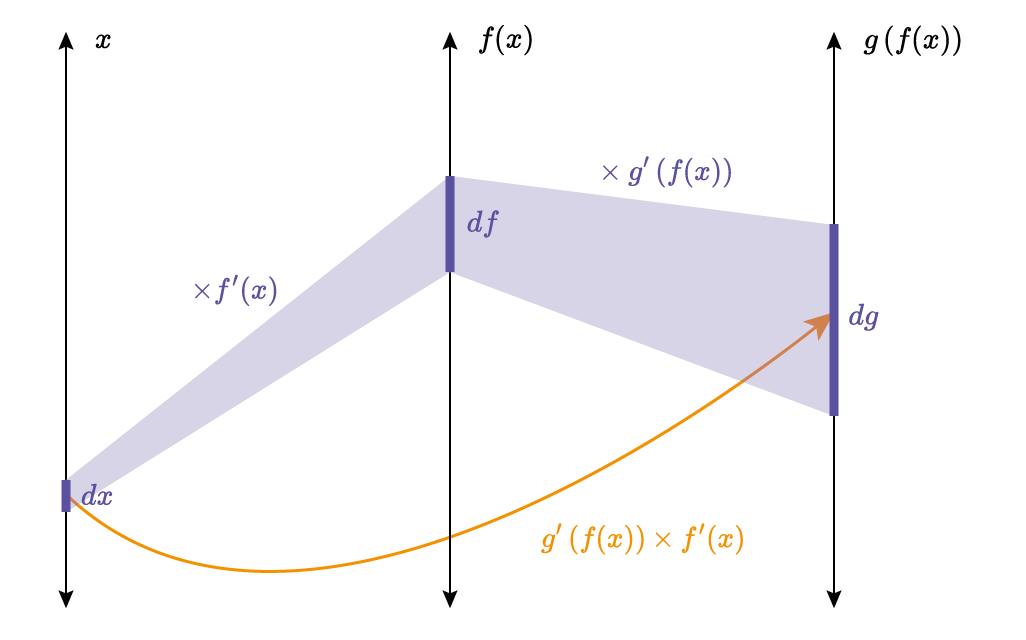
Chain rule
SL 5.6
The chain rule tells you how to find the derivative of a function that is composed with another function. It can be expressed a few different ways:
(g(f(x)))′=g′(f(x))⋅f′(x)🚫
y=g(u) where u=f(x)
dxdy=dudg⋅dxdu📖
Intuitively, what the chain rule is essentially saying is that the rate of change of the composite function is the rate of change of the outside function when you change the inside function times the rate of change of the inside function when you change x.
Product and Quotient rule
SL 5.6
The product and quotient rules are given by
(uv)′=u′v+v′u📖
(vu)′=v2u′v−v′u📖
Derivative of tan(x)
AHL 5.15
f(x)=tanx⇒f′(x)=sec2(x)📖
Derivatives of reciprocal trig functions
AHL 5.15
f(x)=secx⇒f′(x)=secxtanx📖
g(x)=cosecx⇒g′(x)=−cosecxcotx📖
h(x)=cotx⇒h′(x)=−cosec2(x)📖
Derivatives of aˣ and logₐ(x)
AHL 5.15
f(x)=ax⇒f′(x)=axlna📖
g(x)=logax⇒f′(x)=xlna1📖
Derivatives of arcsin, arccos and arctan
AHL 5.15
f(x)=arcsinx⇒f′(x)=√1−x21📖
f(x)=arccosx⇒f′(x)=−√1−x21📖
f(x)=arctanx⇒f′(x)=1+x21📖
Tangents and normals
2 skills
Tangent to f(x)
SL 5.4
L:mx+c is tangent to f(x) at x=a means
same ysame y′{f(a)=ma+cf′(a)=m🚫
Using point slope form the equation of the tangent is:
y−f(a) ⇒y=m⋅(x−a)🚫 =mx−ma+f(a)🚫
Normal to f(x)
SL 5.4
The normal to f(x) at x=a is the line that passes through (a,f(a)) and is perpendicular to the tangent:
mn⋅mt=−1⇔mn =−mt1🚫 =−f′(a)1🚫
Using point slope form the equation of the tangent is:
y−f(a) ⇒y=mn⋅(x−a)🚫 =mnx−mna+f(a)🚫
Applications of the First Derivative
3 skills
Stationary points & Increasing/Decreasing Regions
SL 5.2
f′(x)⎩⎪⎨⎪⎧<0⇔f decreasing=0⇔f stationary>0⇔f increasing🚫
Maxima & Minima
SL 5.7
Stationary points are often local extrema.
If f′(a)=0, f is decreasing to the left of a (f′(x)<0), and f is increasing to the right of a (f′(x)>0), then (a,f(a)) is a local minimum.
If f′(a)=0, f is increasing to the left of a (f′(x)<0), and f is decreasing to the right of a (f′(x)>0), then (a,f(a)) is a local maximum.
Optimisation
SL 5.8
Optimisation problems require you to find a minimum or maximum value by producing a function f(x), taking its derivative, solving f′(x)=0, and confirming which stationary point(s) are minima or maxima.
Second Derivatives and Applications
5 skills
Second Derivative
SL 5.7
The derivative of the derivative of a function is its second derivative:
f′′(x)=(f′(x))′🚫
dx2d2y=dxd(dxdy)=y′′🚫
Concavity
SL 5.7
We determine concavity by the sign of f′′:
f′′{>0⇔f concave up<0⇔f concave down🚫
Classifying stationary points using the second derivative
SL 5.7
At a stationary point (f′(a)=0),
If f′′(a)>0, then f has a local minimum at x=a.
If f′′(a)<0, then f has a local maximum at x=a.
Using the second derivative to classify a stationary point is often called the second derivative test.
Inflexion Points
SL 5.7
Inflexion points occur when f′′(x)=0 and f′′(x) changes sign. 🚫
Graphs of f, f' and f''
SL 5.7
When f′ crosses the x-axis f has a maximum (f′′<0) or minimum (f′′>0)
When f′′ crosses the x-axis, f has an inflexion point.
Related Rates
6 skills
Related Rates
AHL 5.14
Given three variables x, y, and z,
dzdy=dzdx⋅dxdy.
Hence, given dzdx, we can find an expression for dzdy by calculating dxdy.
Implicit Differentiation
AHL 5.14
Implicit differentiation is when we differentiate both sides of an equation. It is helpful when we have an equation that cannot be simplified to y=f(x).
For example:
xy2=x+y
Differentiating both sides with respect to x and using the product rule:
(x)′⋅y2+x⋅(y2)′=x′+y′
By the chain rule, we know that (y2)′=2y⋅dxdy:
1⋅y2+2xy⋅dxdy=1+dxdy
Now collecting dxdy terms:
y2−1=dxdy(1−2xy)
So
dxdy=1−2xyy2−1
Related rates with implicit differentiation
AHL 5.14
Since dtdy=dxdy⋅dtdx, you may be asked to use implicit differentiation to find dxdy, then with a given dtdx and point, you can find dtdy.
Volume related rates
AHL 5.14
Given the time rate of change of radius, length, height, or width of a three dimensional object, you may find the time rate of change of volume by taking the derivative of the volume equation.
Distance related rates
AHL 5.14
Let L be the distance from the origin of a point with coordinates (x,y). Then, given dtdx and dtdy, we can find dtdL at a given point (x,y).
Angle related rates
AHL 5.14
Using a given rate of change dtdx and trigonometry, we can calculate dxdθ, which can be used to find dtdθ.
L'Hôpital's rule
1 skill
L'Hôpital's rule
AHL 5.12
L'Hopital's rule states that for a limit of the form x→alimg(x)f(x), if both f(x) and g(x) approach zero or both approach infinity, then the value of the limit is the same as the value of x→alimg′(x)f′(x).
In intuitive terms, if the limit is indeterminate, we can take the derivative of the top and the bottom and evaluate that limit.
Sometimes, the process of taking derivatives will need to be repeated multiple times before the limit becomes determinate.
Example: x→0limx2ex−1−x
First, check if the limit is indeterminate:
e0−1−0=0
and
02=0
So it is inderterminate. We can apply L'Hopital's rule:
x→0limx2ex−1−x=x→0lim2xex−1
Which is still indeterminate since e0−1=2⋅0=0. Applying L'Hopital's rule again:
x→0limx2ex−1−x=x→0lim2ex
This is no longer indeterminate:
x→0lim2ex=2e0=21
n^th Derivative
1 skill
n^th Derivative
AHL 5.12
The nth derivative of f is
f(n)(x)=f′′′′…′′n times(x)🚫
dxndny=dxd(dxd(…dxd(y)))n times🚫
Implicit differentiation
2 skills
Implicit Differentiation
AHL 5.14
Implicit differentiation is when we differentiate both sides of an equation. It is helpful when we have an equation that cannot be simplified to y=f(x).
For example:
xy2=x+y
Differentiating both sides with respect to x and using the product rule:
(x)′⋅y2+x⋅(y2)′=x′+y′
By the chain rule, we know that (y2)′=2y⋅dxdy:
1⋅y2+2xy⋅dxdy=1+dxdy
Now collecting dxdy terms:
y2−1=dxdy(1−2xy)
So
dxdy=1−2xyy2−1
Implicit Derivative: Horizontal and vertical tangents & normals
AHL 5.14
In problems involving implicit derivatives, you may be asked to solve for points where the tangent to the curve is horizontal or vertical. A horizontal tangent means dxdy=0, and a vertical tangent occurs in the case where dxdy=denominatornumerator and the denominator equals zero.
If the question asks for vertical / horizontal normals, just recall that a vertical normal means a horizontal tangent, and vice-versa.