Topics

Geometric Transformations with Matrices
0 of 0 exercises completed
Matrix representations of geometric transformations in the plane, including images of basis vectors under a 2x2 matrix, enlargements and horizontal or vertical stretches, rotations, reflections, translations, composition of transformations using matrix products, and area scale factor ∣detM∣.
Want a deeper conceptual understanding? Try our interactive lesson!
2x2 matrix transformation images
AHL AI 3.9
A (2×2) matrix M=(acbd) represents a transformation of points in the cartesian plane. For such transformations, we consider x-coordinates in vector form (10), and y-coordinates as (01):
M on (1,0): M on (0,1):(acbd)(10)=(ac) (acbd)(01)=(bd)
In general, the point (x,y) is transformed to
M(xy)=(ax+bycx+dy)🚫
We call the input to a transformation the object and the output the image.
Transformation scales area by det 𝐌
AHL AI 3.9
When a transformation M is applied to a shape, the area of the image is
Aimage=∣detM∣×Aobject🚫
The absolute value is there as a negative determinant flips the orientation of the object, but that does not change the area.
Geometric enlargement with scale factor k
AHL AI 3.9
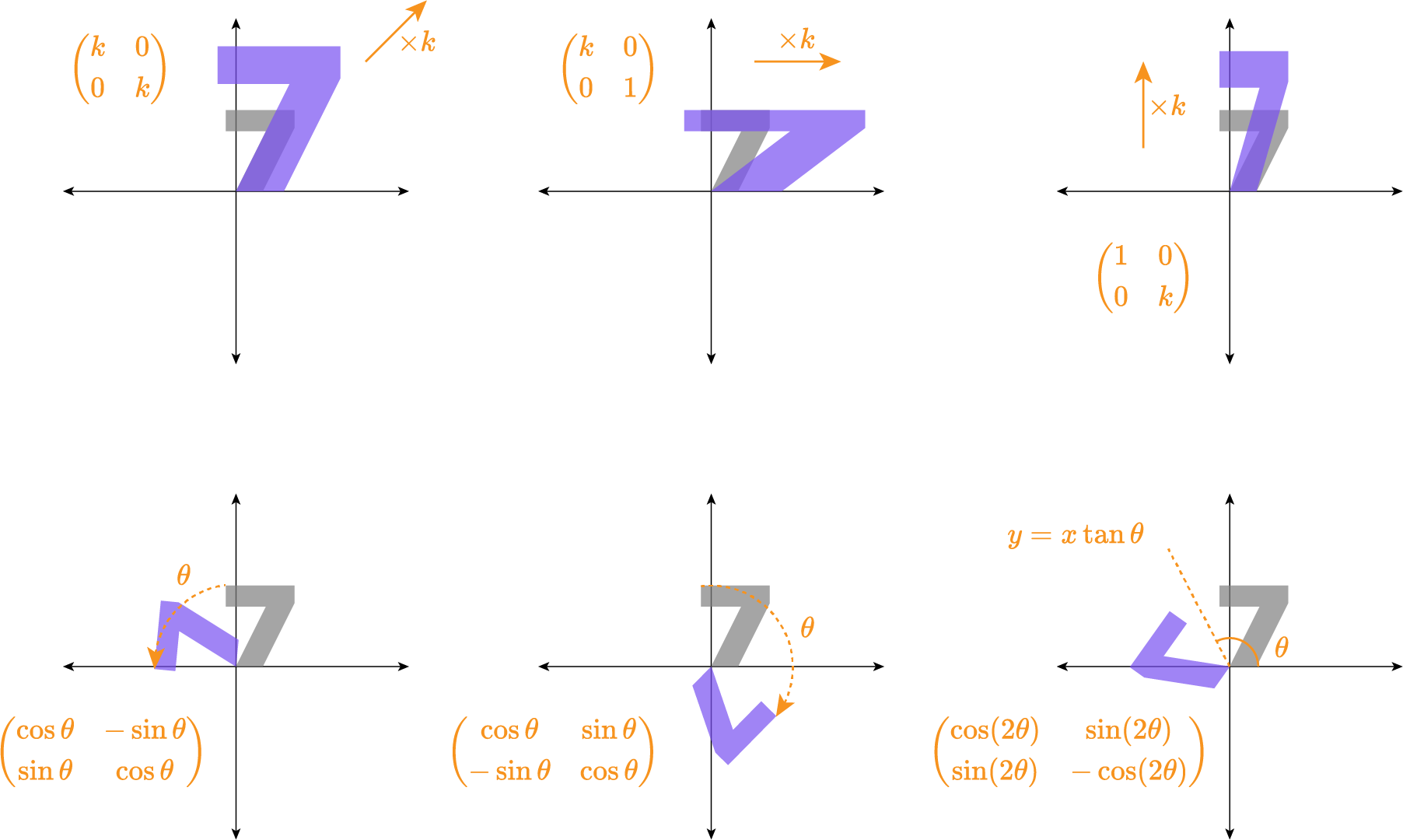
The matrix M=(k00k) acts as a geometric enlargement with a scale factor k.
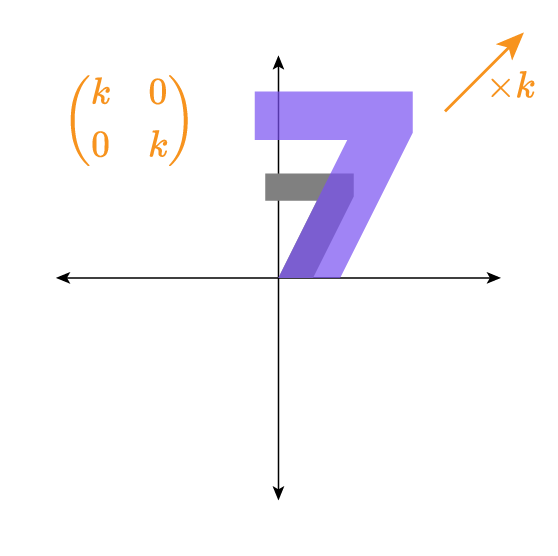
Try adjusting k or the position of the gray square in the simulation below.
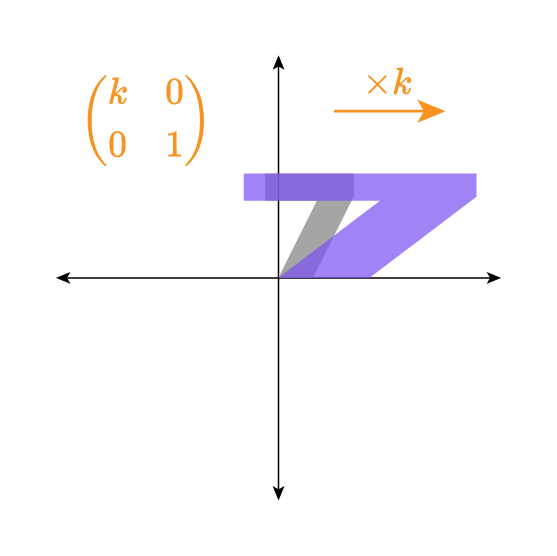
(k001)
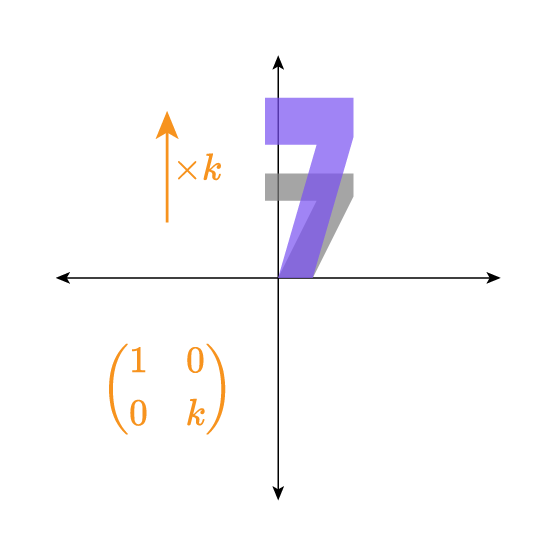
(100k)
Horizontal and vertical stretch by scale factor k
AHL AI 3.9
The matrix M=(k001) acts as a geometric stretch with a scale factor k in the horizontal direction.
The matrix M=(100k) acts as a geometric stretch with a scale factor k in the vertical direction.
Clockwise and counterclokwise rotation matrices
AHL AI 3.9
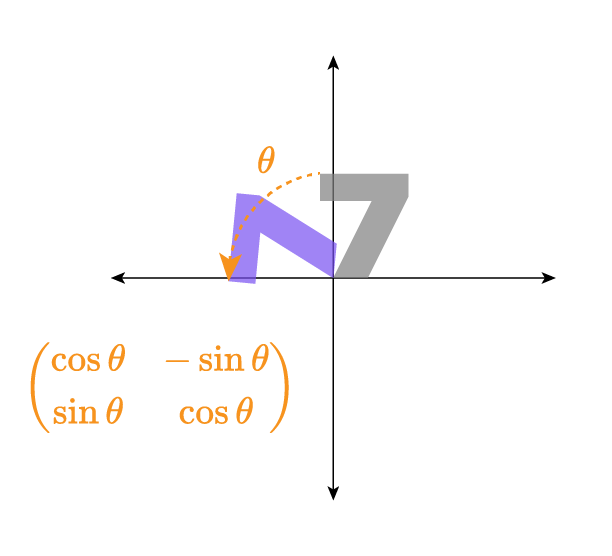
We can represent rotations about the origin with matrices:
A counterclockwise rotation is represented by (cosθsinθ−sinθcosθ).
A clockwise rotation is represented by (cosθ−sinθsinθcosθ).
![<ul>
<li>A 2D Cartesian coordinate system with horizontal and vertical axes, each shown with arrowheads.</li>
<li>Two congruent polygonal shapes sharing a common vertex at the origin: one gray (positioned in the first quadrant, with a short horizontal top segment and a slanted segment down to the origin) and one purple (rotated into the fourth/third quadrants).</li>
<li>An orange dashed arc with an arrow, drawn clockwise around the origin, labeled θ, indicating the angular relation between the two shapes.</li>
<li>An orange 2×2 matrix displayed at lower left: [ [cos θ, sin θ], [−sin θ, cos θ] ].</li>
</ul>](https://firebasestorage.googleapis.com/v0/b/perplex-learning.appspot.com/o/cheat_sheet%2F1755981851489-c.png?alt=media&token=ef29db09-a780-4111-9009-58ed6c34ee28)
Matrix reflection in the line tanθ
AHL AI 3.9
The matrix (cos2θsin2θsin2θ−cos2θ) represents a reflection in the line y=xtanθ, which is the line through the origin forming an angle of θ with the positive x-axis.
In summary:
Translation by a vector
AHL AI 2.8
If a point P is translated by a vector (ab), apply a translation a units to the right and b units up:
P(x,y)P′(x+a,y+b).
Composing matrix transformations
AHL AI 3.9
Geometric transformations represented by matrices can be chained together, and the combined transformation is represented by the product of the matrices. For example, transformation A then B then C is represented by the matrix (CBA).
Notice that the matrix product has the opposite order from the transformations, since
(CBA)(x)=(CB)(Ax)=C((B(Ax)))
Nice work completing Geometric Transformations with Matrices, here's a quick recap of what we covered:
Skills covered
Exercises checked off
I'm Plex, here to help you understand this concept!